ベストテクノロジーのAI Motorをワンダースワンにつないでみる。
 ウィッチユーザーの方々には、あまり馴染みが無いかもしれませんが、今回はロボットの制御に挑戦してみました(文/松原拓也)。
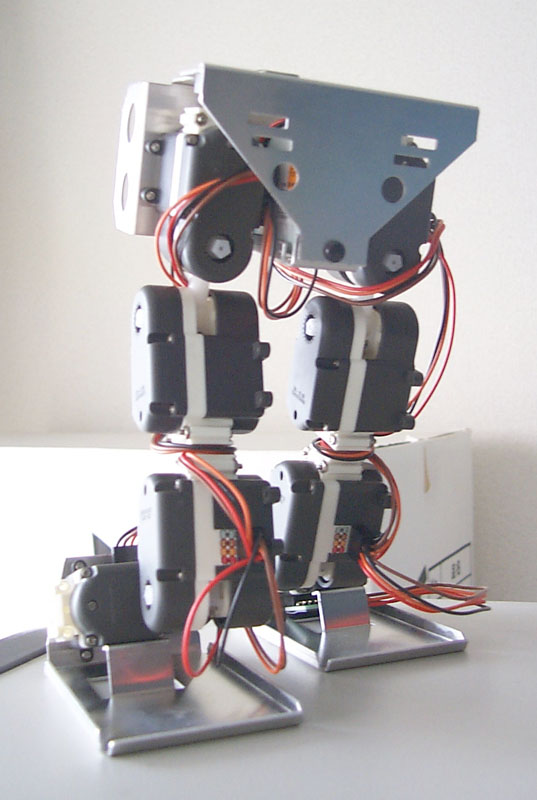
ウィッチユーザーの方々には、あまり馴染みが無いかもしれませんが、今回はロボットの制御に挑戦してみました(文/松原拓也)。こちらは、ベストテクノロジーの「FD Jr. 8軸バージョン」という二足歩行ロボットの組み立てキットです。このロボットは、「AI Motor-601」という小型ロボット用のモータを8個搭載しています。このキットでは、通常、モータはパソコンで制御します。 なお、「AI Motor-601」は秋葉原の ツクモロボコンマガジン館で入手できます。
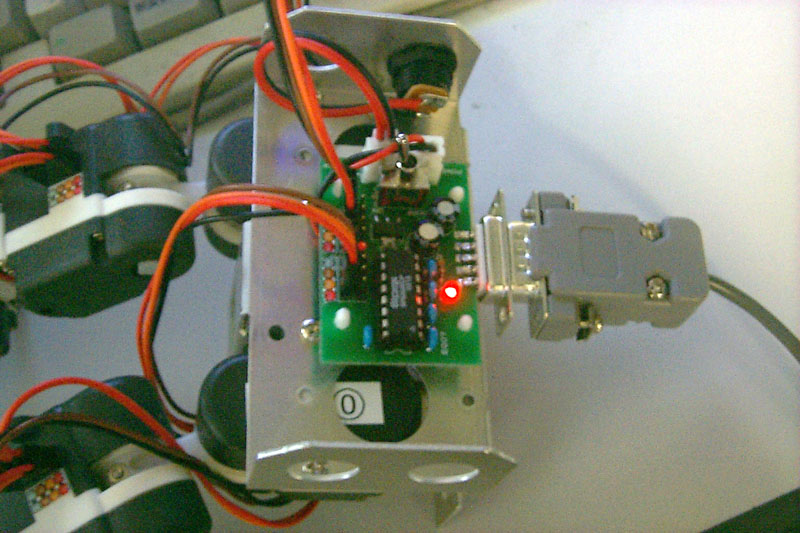 「AI Motor-601」はデイジーチェーン接続(数珠つなぎ)で「I/Fボード」という基板(レベル変換用の回路)につながっています。このため、パソコンから発せられたコマンドは、全部のモータに行き渡ります。
「I/Fボード」は、Dsub9ピンのシリアルポートを装備しています。そこで、このコネクタにワンダースワン(ウィッチ)をつなげられないか、実験してみました。
「AI Motor-601」はデイジーチェーン接続(数珠つなぎ)で「I/Fボード」という基板(レベル変換用の回路)につながっています。このため、パソコンから発せられたコマンドは、全部のモータに行き渡ります。
「I/Fボード」は、Dsub9ピンのシリアルポートを装備しています。そこで、このコネクタにワンダースワン(ウィッチ)をつなげられないか、実験してみました。
 では、「AI Motor Configurator」というソフトを使って、ボーレートを変更します(ワンダースワンが対応してるのは9600bpsと38400bpsだけ)。通常、モータへの設定は1個ずつ行うものなんですが、ボーレートの変更に限っては一括で行えるようです。一旦、デフォルトの通信速度である「115200」で回線をオープンして、「BAUDRATE(ボーレート)」の値を「38400」に変更して「SET」ボタンを押します。なお、ボーレートを変えてしまうと、再度、その速度で回線を開き直す必要があります。注意してください。
では、「AI Motor Configurator」というソフトを使って、ボーレートを変更します(ワンダースワンが対応してるのは9600bpsと38400bpsだけ)。通常、モータへの設定は1個ずつ行うものなんですが、ボーレートの変更に限っては一括で行えるようです。一旦、デフォルトの通信速度である「115200」で回線をオープンして、「BAUDRATE(ボーレート)」の値を「38400」に変更して「SET」ボタンを押します。なお、ボーレートを変えてしまうと、再度、その速度で回線を開き直す必要があります。注意してください。
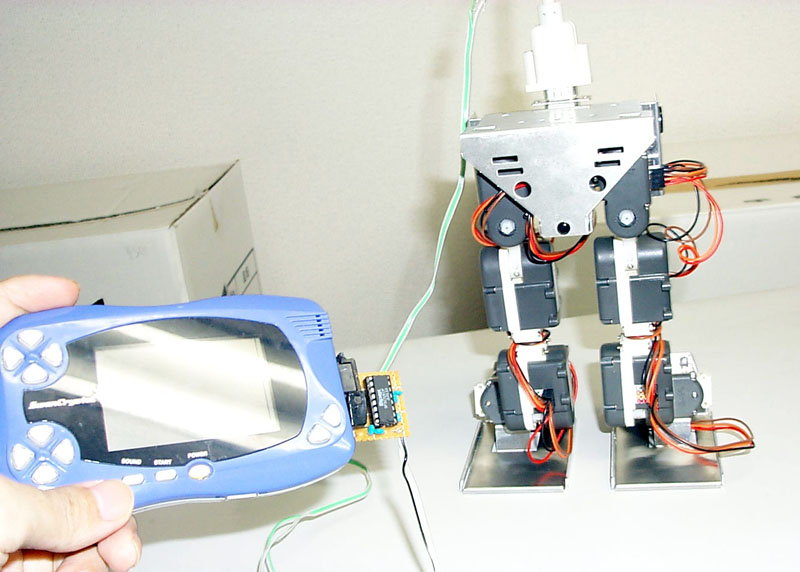
 ハード的な変更はいりません。ワンダースワンとロボットを、自作スワンケーブルとクロスケーブルでつなけば、完成です。簡単です。
ハード的な変更はいりません。ワンダースワンとロボットを、自作スワンケーブルとクロスケーブルでつなけば、完成です。簡単です。
これで、スワンがコントローラがわりです。 パソコンをつなぐよりスマートですよね?
 制御用のプログラムを自作してみました。原理は簡単で、シリアル通信用の関数を使って「Position Send」コマンドをひたすらモータに送信してるだけです。ロボットの関節の角度データは二次元配列にして、ソースに組み込みました。
制御用のプログラムを自作してみました。原理は簡単で、シリアル通信用の関数を使って「Position Send」コマンドをひたすらモータに送信してるだけです。ロボットの関節の角度データは二次元配列にして、ソースに組み込みました。使い方ですが、A/Bボタンを押すと、1ページずつロボットが動きます。9ページで一巡するように作りましたので、9回押すと2歩進みます。
【Download】制御プログラム(WonderWitch用 / フリーウェア / 4 K Bytes)
 こちらが実行結果です。ボタン操作に合わせてロボットが歩いてますね? 実験成功です。
こちらが実行結果です。ボタン操作に合わせてロボットが歩いてますね? 実験成功です。歩き方がちょっとイマイチですが、歩行のモーションを調整すれば直ると思います。
【Movie】「実行時のムービー」(MPEG1 / 3.4M Bytes)
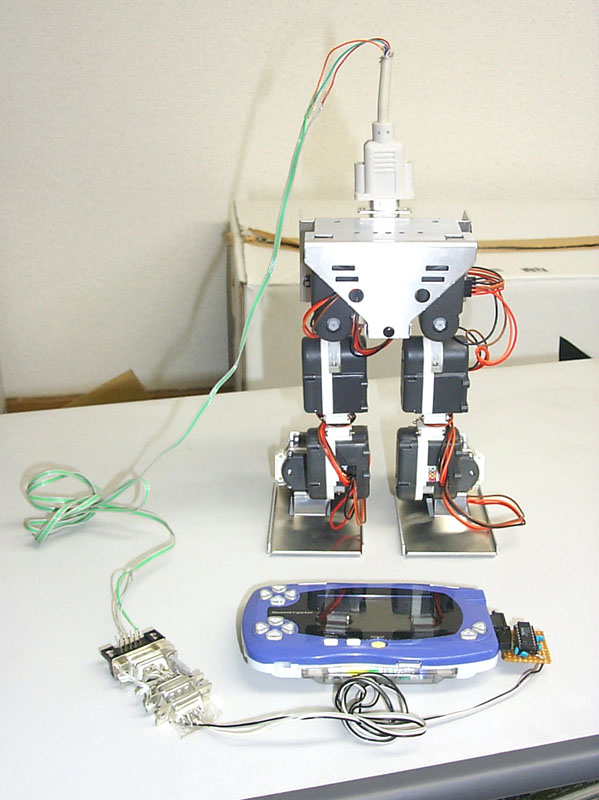
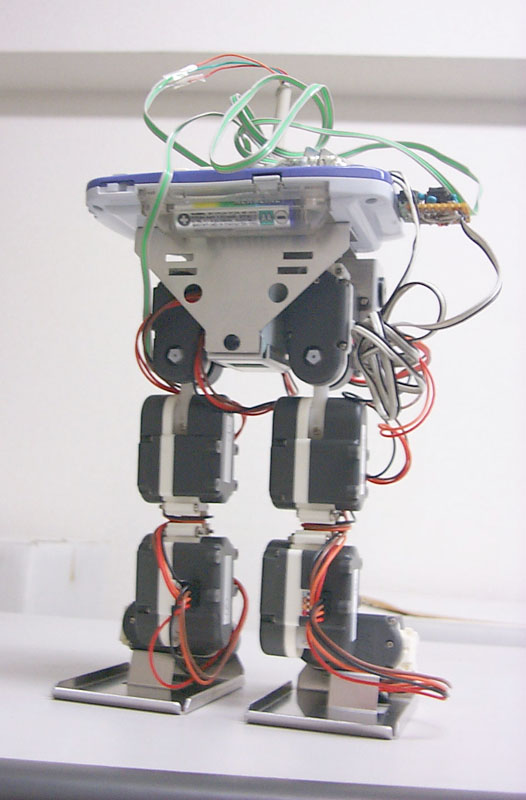 スワンを上に乗せてみました(のせただけ)。名付けて「二足歩行ワンダースワン」
です。これで一応、自律型ロボットの完成です。
スワンを上に乗せてみました(のせただけ)。名付けて「二足歩行ワンダースワン」
です。これで一応、自律型ロボットの完成です。皆さんもいろんなものにスワンをつないで遊んでみてはいかがでしょうか。ではまた。